Description
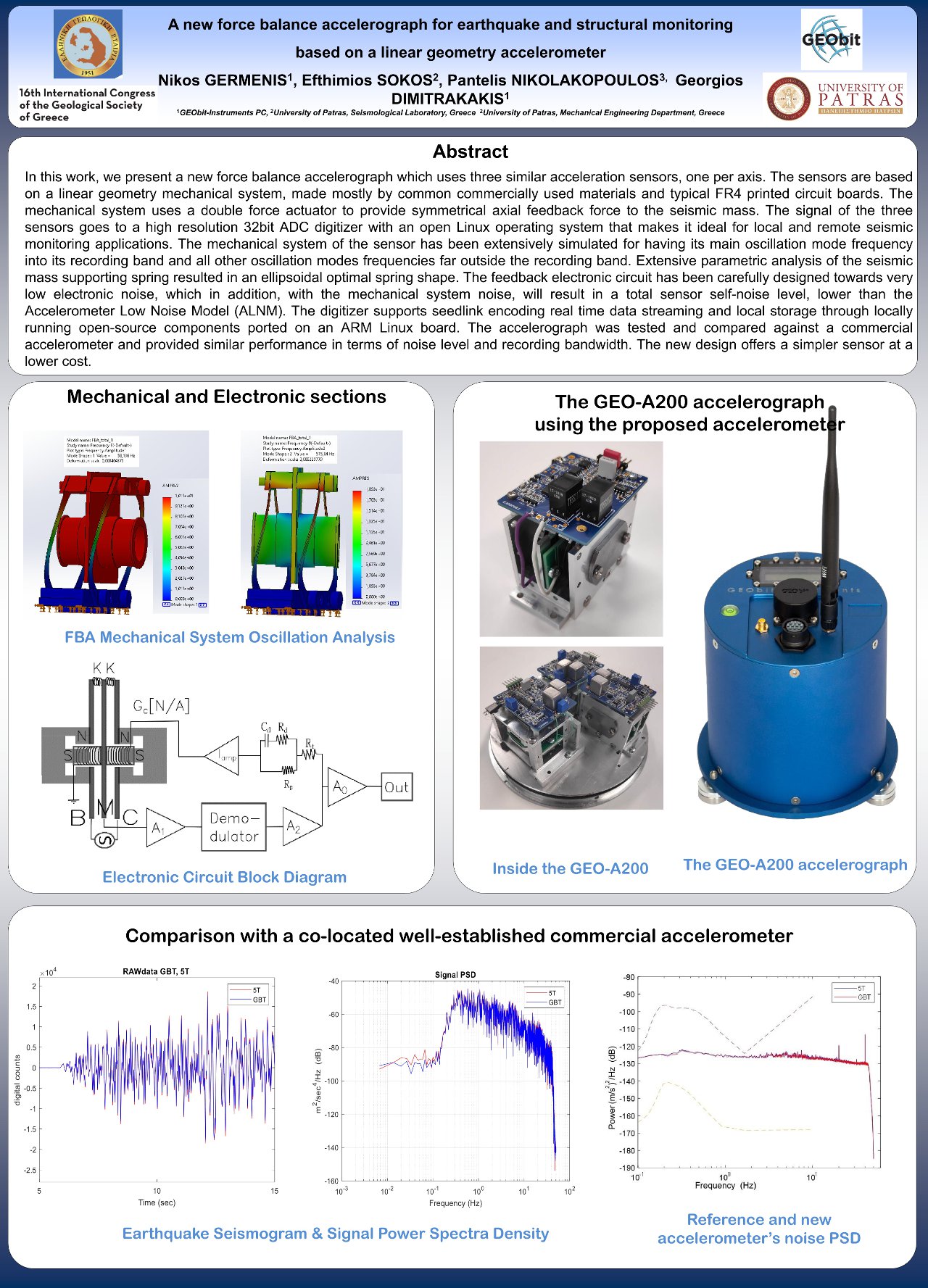
In this work, we present a new force balance accelerograph which uses three similar acceleration sensors, one per axis. The sensors are based on a linear geometry mechanical system, made mostly by common commercially used materials and typical FR4 printed circuit boards. The mechanical system uses a double force actuator to provide symmetrical axial feedback force to the seismic mass. The signal of the three sensors goes to a high resolution 32bit ADC digitizer with an open Linux operating system that makes it ideal for local and remote seismic monitoring applications. The mechanical system of the sensor has been extensively simulated for having its main oscillation mode frequency into its recording band and all other oscillation modes frequencies far outside the recording band. Extensive parametric analysis of the seismic mass supporting spring resulted in an ellipsoidal optimal spring shape. The feedback electronic circuit has been carefully designed towards very low electronic noise, which in addition, with the mechanical system noise, will result in a total sensor self-noise level, lower than the Accelerometer Low Noise Model (ALNM). The digitizer supports seedlink encoding real time data streaming and local storage through locally running open-source components ported on an ARM Linux board. The accelerograph was tested and compared against a commercial accelerometer and provided similar performance in terms of noise level and recording bandwidth. The new design offers a simpler sensor at a lower cost.